複素数の積には極形式が便利で,2つの複素数$z$, $w$が
- $z=r(\cos{\theta}+i\sin{\theta})$
- $w=s(\cos{\phi}+i\sin{\phi})$
と表されていれば,積$zw$は
\begin{align*}zw=rs(\cos{(\theta+\phi)}+i\sin{(\theta+\phi)})\end{align*}
さて,この極形式の積の見方を少し変えれば,複素平面上の拡大縮小・回転を考えることができます.
この記事では,複素平面上の
- 点の拡大縮小・回転
- ベクトルの拡大縮小・回転
を順に説明します.
「複素数」の一連の記事
点の拡大縮小・回転
複素平面上の点の拡大縮小・回転を
- 原点中心の場合
- 一般の点中心の場合
の2ステップで考えましょう.
ステップ1(原点中心の場合)
冒頭で書いたように極形式で表された2つの複素数$z=r(\cos{\theta}+i\sin{\theta})$, $w=s(\cos{\phi}+i\sin{\phi})$に対して,
\begin{align*}zw=rs\{\cos{(\theta+\phi)}+i\sin{(\theta+\phi)}\}\end{align*}
が成り立ちます.このとき,複素平面上で複素数$z$が表す点を$\mrm{P}$とし,複素数$zw$が表す点を$\mrm{Q}$とすると下図のようになりますね.

つまり,複素平面上の複素数$z$が表す点に対して
- 原点$\mrm{O}(0)$からの距離を$s$倍
- 原点$\mrm{O}(0)$中心に偏角を$+\phi$
した点が複素数$zw$の表す点となっています.
このことは,以下のように表すことができますね.
[原点中心の点の回転] $s\geqq0$, $\phi$を実数とする.複素平面上の点$\mrm{P}(z)$に対して,複素数
\begin{align*}z’=z\cdot s(\cos{\phi}+i\sin{\phi})\end{align*}
が表す点$\mrm{Q}(z’)$は原点中心に$s$倍拡大,$+\phi$回転した点である.

要するに,複素平面上の点$\mrm{P}(z)$に対して,
- 原点からの距離を$s$倍したければ,$z$に$s$をかければよく
- 原点中心に偏角を$+\phi$したければ,$z$に$\cos{\phi}+i\sin{\phi}$をかければよい
というわけですね.
ステップ1(一般の点中心の場合)
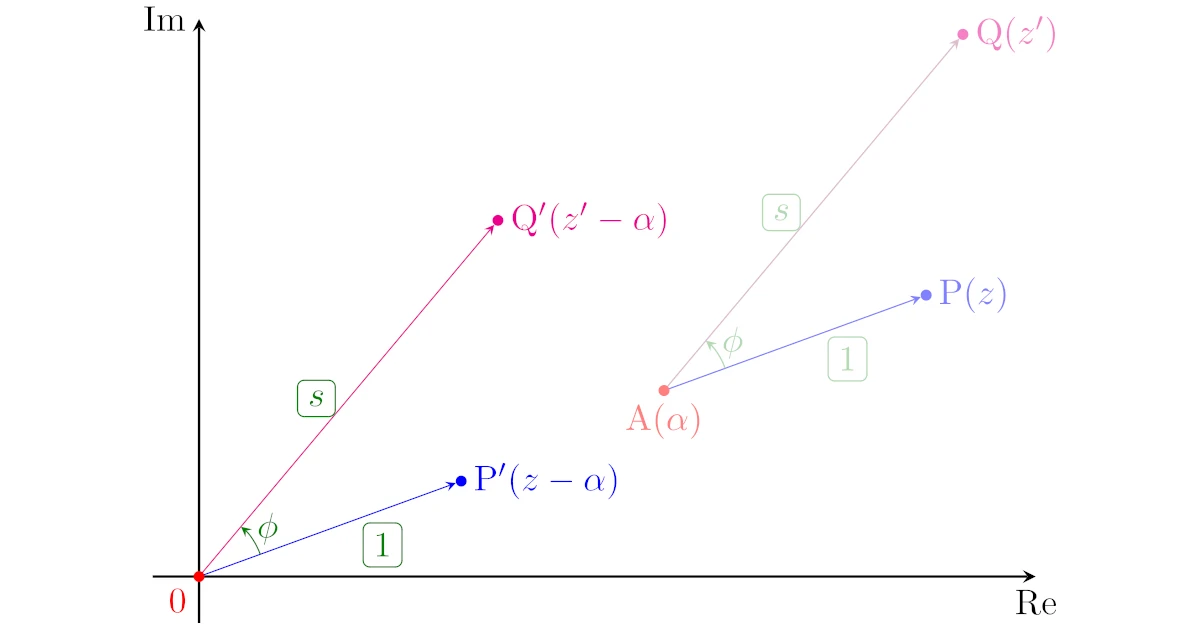
次に,複素平面上の原点とは限らない点$\mrm{A}(\alpha)$中心の拡大縮小・回転を考えましょう.
複素平面上の点$\mrm{P}(z)$に対して,
- 点$\mrm{A}(\alpha)$からの距離を$s$倍
- 点$\mrm{A}(\alpha)$中心に偏角を$+\phi$
した点を$\mrm{Q}(z’)$としましょう.

このとき,点$\mrm{A}$が原点$\mrm{O}(0)$にくるように全体を平行移動させると,点$\mrm{P}$は点$\mrm{P’}(z-\alpha)$,点$\mrm{Q}$は点$\mrm{Q’}(z’-\alpha)$に移ります.

点$\mrm{Q’}(w-\alpha)$は,点$\mrm{P’}(z-\alpha)$に対して
- 原点$\mrm{O}(0)$からの距離を$s$倍
- 原点$\mrm{O}(0)$中心に偏角を$+\phi$
した点となっているので,先ほどみた原点中心の拡大縮小・回転の考え方から
\begin{align*}&z’-\alpha=(z-\alpha)\cot s(\cos{\phi}+i\sin{\phi})
\\\iff&z’=(z-\alpha)\cdot s(\cos{\phi}+i\sin{\phi})+\alpha\end{align*}
が成り立ちます.以上をまとめると,以下のようになりますね.
$s\geqq0$, $\phi$を実数とする.複素平面上の点$\mrm{A}(\alpha)$,点$\mrm{P}(z)$に対して,複素数
\begin{align*}z’=(z-\alpha)\cdot s(\cos{\phi}+i\sin{\phi})+\alpha\end{align*}
が表す点$\mrm{Q}(z’)$は点$\mrm{A}$中心に$s$倍拡大,$+\phi$回転した点である.
当然のことながら,$\alpha=0$の場合には
\begin{align*}z’=z\cdot s(\cos{\phi}+i\sin{\phi})\end{align*}
となって,原点中心の拡大縮小・回転と一致しますね.
ベクトルの拡大縮小・回転
いまみた複素平面上の点$\mrm{A}(\alpha)$中心の拡大縮小・回転の式は
\begin{align*}z’-\alpha=(z-\alpha)\cdot s(\cos{\phi}+i\sin{\phi})\end{align*}
でしたが,これは複素平面上のベクトルの拡大縮小・回転と考えると,すっきり説明ができます.
複素平面上のベクトル
$xy$平面は複素平面と同一視できるので,$xy$平面上のベクトルは複素平面上のベクトルと同一視できます.例えば,
- $xy$平面上の点$\mrm{A}(1,1)$, $\mrm{B}(4,3)$に対して,$\Ve{AB}=(3,2)$
- 複素平面上の点$\mrm{A}(1+i)$, $\mrm{B}(4+3i)$に対して,$\Ve{AB}=3+2i$
が対応するわけですね.

このように,複素平面上の2点$\mrm{A}(\alpha)$, $\mrm{B}(\beta)$があるとき,$\Ve{AB}$は複素数$\beta-\alpha$で表すことができます.
ベクトルの拡大縮小・回転
このように考えると,複素平面上の点$\mrm{P}(z)$の点$\mrm{A}(\alpha)$中心の拡大縮小・回転
\begin{align*}z’-\alpha=(z-\alpha)\cdot s(\cos{\phi}+i\sin{\phi})\end{align*}
は,$z-\alpha$で表されるベクトル$\Ve{AP}$を拡大縮小・回転して$z’-\alpha$で表されるベクトル$\Ve{AQ}$になっているということもできますね.

このように,
- 点$\mrm{A}(\alpha)$中心の回転
- 点$\mrm{A}(\alpha)$を始点とするベクトルの回転
は同じものとみることができます.以上をまとめると,次のようになりますね.
[ベクトルの回転] $s\geqq0$, $\phi$を実数とする.複素平面上の3点$\mrm{A}(\alpha)$, $\mrm{P}(z)$, $\mrm{Q}(z’)$に対して,
\begin{align*}z’-\alpha=(z-\alpha)\cdot s(\cos{\phi}+i\sin{\phi})\end{align*}
が成り立つとき,ベクトル$\Ve{AQ}$はベクトル$\Ve{AP}$を$s$倍拡大,$+\phi$回転してできるベクトルである.
コメント